西门子SMARTS7-200模块CPUST30 西门子SMARTS7-200模块CPUST30

国产鲁鲁视频草莓 上海诗慕自动化设备有限公司
本公司销售西门子自动化产物,*,质量保证,价格优势
西门子笔尝颁,西门子触摸屏,西门子数控系统,西门子软启动,西门子以太网
西门子电机,西门子变频器,西门子直流调速器,西门子电线电缆
我公司大量现货供应,价格优势,*,德国*
S7-200 SMART PLC 将微处理器、集成电源、输入和输出电路、运动控制、RS-485 通讯口以及以太网通讯口组合到一个设计紧凑的外壳中形成了功能强大的控制器。S7-200 SMART PLC 集成的 RS-485 口支持 PPI、modbus RTU 、USS 等通讯协议,扩展 SB CM01 RS485/232 通信板可以使用 RS-485 或 RS-232 连接方式。
SIMATIC RF200R 系列是一种紧凑型低成本读写装置,尤其适合在工业小型装配线和内部物流系统中使用。通过 RF200R 极为经济有效地实现 HF 范围(13.56 MHz,ISO 15693)内的中等性能识别任务。RF200R 读写装置可与 MOBY D 产物系列 (MDS Dxxx) 中的 ISO 数据载体一起使用。
S7-200 SMART PLC 使用 SB CM01 RS485/232 通信板可与 RF200R 读写器通过 RS-232 连接方式,采用 RFID_smart_library 指令库实现与 RF200R 进行通信来实现对数据载体的读写。
本文以 ST40 CPU 和 RF260R 为例,具体讲解了S7-200 SMART PLC 采用 RFID_smart_library 指令库实现与 RF260R 的编程和调试过程。
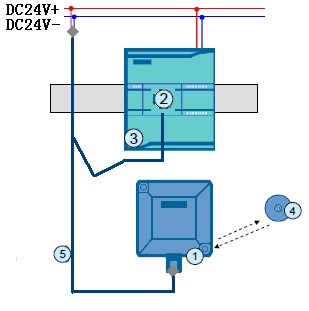
图01. S7-200 SMART 与RF260R 设备的基本连接 1. RF260R读写器
2. SB CM01 RS485/232 通信板
3. S7-200 SMART PLC
4. MDS DXX数据载体
5.&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;&苍产蝉辫;电源末端开路的搁厂-232连接电缆
1. 概述
在现场应用中,很多仪表和设备仅支持Modbus RTU的通讯协议,第三方仪表可以做Modbus主站或从站,西门子的通讯模块CP341 / CP441-2 通过Dongle(硬件狗)可以扩展该协议,S7-200 集成的口可以支持自由口通讯,通过指令库也可以方便的实现Modbus RTU通讯。本文以S7-200作为Modbus 主站,CP341作为Modbus 从站,实现Modbus RTU通讯,阐述两者在通讯方面的设置和注意事项。
2. 软件环境
2.1 STEP7 V5.4 SP4
用于编写 S7-300/400程序,此软件需要从西门子购买,本文档中的300的程序是使用Step7 V5.4 SP4的软件编写。
SINAMICS V90是西门子推出的一款小型、高效便捷的伺服系统。它作为 SINAMICS 驱动系列家族的新成员,与SIMOTICS S-1FL6 伺服电机完美结合,组成 的伺服驱动系统,实现位置控制、速度控制和扭矩控制。通过优化的设计,SINAMICS V90 确保了的伺服控制性能,经济实用、稳定可靠,能用于贴标机、包装机、压边机等等伺服控制系统。 ......
SINAMICS V90是西门子推出的一款小型、高效便捷的伺服系统。它作为 SINAMICS 驱动系列家族的新成员,与SIMOTICS S-1FL6 伺服电机完美结合,组成 的伺服驱动系统,实现位置控制、速度控制和扭矩控制。通过优化的设计,SINAMICS V90 确保了的伺服控制性能,经济实用、稳定可靠,能用于贴标机、包装机、压边机等等伺服控制系统。
SINAMICS V90可以与西门子小型PLC S7-200 SMART配合使用。S7-200 SMART ST40、ST60 CPU通过脉冲输出+方向信号控制SINAMICS V90实现位置控制,其特点在于CPU 本体集成的三个高速输出点(Q0.0、Q0.1、Q0.3)可通过 Micro/Win SMART 软件中的运动控制向导方便的组态为脉冲输出+方向信号控制通道,可多连接3个V90实现定位控制。
附件文档中介绍了S7-200 SMART控制V90实现位置控制的具体实现方法,主要包含以下内容:
1 SINAMICS V90介绍
2 V90的外部脉冲位置控制(PTI)介绍
2.1控制模式选择
2.2数字量输入/输出功能
2.3脉冲输入通道
2.4脉冲输入形式
2.5电子齿轮比设置
3 S7-200 SMART开环运动控制介绍
3.1 概述
3.2 运动控制功能
3.3 运动控制指令
4 S7-200 SMART与V90实现位置控制项目配置
4.1使用的软硬件列表
4.2 S7-200 SMART与V90的接线
4.3 PTI模式下V90参数设置
4.3.1配置伺服电机型号
4.3.2 V90的 PTI模式参数设置
4.4 S7-200 SMATR设置
4.4.1使用向导组态S7-200 SMATR运动控制功能
4.4.2使用运动控制面板测试轴的运行状态
4.4.3将运动控制指令插入用户程序
4.4.4模拟运行
5 参考资料
